10 October 2017
New research being undertaken at the University of South Australia could see robots learn to help frail and elderly people who fall in their homes to get up again safely, reducing further injuries.
In a bid to reduce the 80,000 injuries and about 1000 fatalities caused by elderly falls in Australia each year, UniSA PhD candidate Kalana Ishara Withanage is leading a project to enable companion robots to autonomously help older people who live alone to get up again if they have fallen.
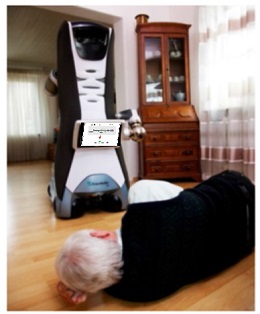
The computer science student and his UniSA senior colleagues are developing robotic vision algorithms that will allow robots to autonomously move to a position with an unobstructed view of the elderly person who has fallen, and provide assistance to the person in order to get up safely.
Withanage says sensors in the home, such as surveillance cameras and microphones could be used to alert a robot that a person has fallen over.
“The robot could then find the fallen person and analyse their situation though remote heart rate monitoring and by asking questions, the answers to which will be processed by voice recognition,” he says.
“If emergency care is not required, the robot could provide audio-visual prompts to guide the person to stand up safely.”
He says the algorithm being developed would then allow the robot to track an individual’s progress as they stand up and, using the robot’s onboard cameras, provide corrective guidance if the person tries to undertake an unsafe movement.
Withanage says the research will save lives.
“Every year, elderly falls account for 80,000 injuries, 1000 fatalities and $800 million in hospital care,” he says.
“Sixty per cent of injuries and deaths are the result of repeated falls, which are preventable if the person had gotten up properly in the first instance.
“Older people living alone cannot have a physiotherapist by their side at all times so if they happen to fall, a robot guiding them to get up safely could be a life saver.
“Existing technologies are insufficient to aid a fallen person, because when a person is lying down and some body parts are obstructed from view, body part detection is highly unreliable,” Withanage says.
The current research sets itself apart from previous studies by developing algorithms allowing a robot to recognise ‘sub-activities’ in fall recovery, such as lying down, rolling to the side and crawling. This allows the robot to track the person’s movements as they stand up.
Withanage says the research will have broader applications as well - for example, robots that offer real-time physical guidance for sports and dance training in-situ.
“Our research hopes to give the next generation of robots the eyes and judgment of a physiotherapist or physical trainer,” he says.
“Our ultimate goal is to develop a robot that really can provide physical assistance to a fallen person and the way we are heading, that could be a reality in the not-so-distant future.”
Withanage’s PhD thesis, ‘In-situ robotic assistance for elderly fall recovery,’ is expected to be submitted in February 2018.
He is undertaking the research alongside engineering experts Dr Ivan Lee and Dr Russell Brinkworth from UniSA’s Mawson Lakes campus, and Associate Professor Shylie Mackintosh and Dr Dominic Thewlis (currently Associate Professor at University of Adelaide) from UniSA’s School of Health Sciences.
Media contact: Candy Gibson mobile 0434 605 142 email candy.gibson@unisa.edu.au